La Robótica Educativa significa poner al alcance de los alumnos las herramientas necesarias para que desarrollen dispositivos externos a la computadora, controlados por ésta, a través de un interfaz.
Anteriormente se trabajaba con LOGO en el aula, donde los alumnos movían distintos elementos en la pantalla, animando diversas figuras. El termino LOGO es un lenguaje informático diseñado para el aprendizaje de una manera activa, exploratoria y vivencial, es además un recurso que somete al usuario a una prueba sobre la coherencia de sus ideas al tratar de ordenar algo a la computadora, o a un robot. Fue creado por Seymour Papert quien basó su trabajo en la filosofía de Jean Piaget sobre la forma de aprender de los niños mediante sus propios descubrimientos.
Los alumnos empiezan a programar aprendiendo a trazar un dibujo, para ello utilizan en los niveles pequeños un Robot cuyo desplazamiento es en el plano horizontal ( el mismo en el que ellos se desplazan). Para en el nivel 5 años comenzar a utilizar el LOGO GRÁFICO con una TORTUGA que “vive” en la pantalla del monitor. Para su puesta en funcionamiento es necesario darle órdenes, lo cual implica situarlos en un plano diferente al que se mueven habitualmente (plano vertical). Los comandos básicos son: adelante (AD), atrás (AT), derecha (DE), izquierda (IZ), con pluma (CP) y sin pluma (SP); etc. El uso frecuente de este programa pone en evidencia el proceso intelectual realizado por los alumnos y facilita la auto corrección en el razonamiento lógico.
Ventajas que ofrece la Robótica Educativa:
Permite la integración de distintas áreas del conocimiento.
Requiere de integración y construcción de un Robot educativo.
Pretende lograr la integración cognitivo-tecnológico.
Poner al alcance de docentes y alumnos recursos tecnológicos de última generación.
El lenguaje de programación es sencillo, pero impuesto.
El alumno adquiere la capacidad de diseñar.
Adquieren fluidez tecnológica en electrónica.
Facilitan la creatividad y resolución de problemas.
Desventajas que ofrece la Robótica Educativa:
El ensamblaje de partes no es tan impactante cognitivamente.
No se propicia el aprendizaje inductivo.
Es necesario disponer de tiempo y dinero para su actualización.
Los robots han sido clasificados de acuerdo a su generación, a su nivel de inteligencia, a su nivel de control, y a su nivel de lenguaje de programación, que serán listados a continuación:
1.- Robots Play-back, los cuales regeneran una secuencia de instrucciones grabadas, como un robot utilizado en recubrimiento por spray o soldadura por arco.
2.- Robots controlados por sensores, estos tienen un control en lazo cerrado de movimientos manipulados, y hacen decisiones basados en datos obtenidos por sensores.
3.- Robots controlados por visión.
4.- Robots controlados adaptablemente.
5.- Robots con inteligencia artificial, que utilizan para hacer sus propias decisiones y resolver problemas.
La Asociación de Robots Japonesa (JIRA) ha clasificado a los robots dentro de seis clases sobre la base de su nivel de inteligencia:
1.- Dispositivos de manejo manual, controlados por una persona.
2.- Robots de secuencia arreglada.
3.- Robots de secuencia variable, donde un operador puede modificar la secuencia fácilmente.
4.- Robots regeneradores, donde el operador humano conduce el robot a través de la tarea.
5.- Robots de control numérico, donde el operador alimenta la programación del movimiento, hasta que se enseñe manualmente la tarea.
6.- Robots inteligentes, los cuales pueden entender e interactuar con cambios en el medio ambiente.
Los sistemas de programación de robots caen dentro de tres clases :
1.- Sistemas guiados, en el cual el usuario conduce el robot a través de los movimientos a ser realizados.
2.- Sistemas de programación de nivel-robot, en los cuales el usuario escribe un programa de computadora al especificar el movimiento y el sensado.
3.- Sistemas de programación de nivel-tarea, en el cual el usuario especifica la operación por sus acciones sobre los objetos que el robot manipula.
Los robots están entrando a un gran número de áreas, por ejemplo, en los laboratorios llevan acabo con efectividad tareas repetitivas como la colocación de tubos de prueba dentro de los instrumentos de medición. En ésta etapa de su desarrollo los robots son utilizados para realizar procedimientos automatizados. Las muestras son movidas desde la estación de laboratorios por el robot bajo el control de procedimientos de un programa.
 Los fabricantes de estos sistemas mencionan tener ventajas sobre la operación manual como: incrementan la productividad, mejoran el control de calidad y reducen la exposición del ser humano a sustancias químicas nocivas, además de reducir personal.
Los fabricantes de estos sistemas mencionan tener ventajas sobre la operación manual como: incrementan la productividad, mejoran el control de calidad y reducen la exposición del ser humano a sustancias químicas nocivas, además de reducir personal.
Encontramos por ejemplo los brazos de robot educativos de gran flexibilidad, control por Internet, controlables por microcontroladores y PCs. Dichos brazos están diseñados para ser ensamblados fácilmente por técnicos y estudiantes, sin requerir herramientas especializadas. Podrán ser controladas por medio de computadoras personales, micro computadoras o microcontroladores que posean un puerto de comunicación serie. Incluyen una interfaces de control y con capacidad de medir el torque ejercido por cada coordenada. Excelente para salas educativas!, después de armarlo y estudiar los principios de la robótica, será un excelente adorno o manipulador remoto para tu habitación o sala de juegos o estudio!
Axis EduArm™ Precio: $199
 Este kit es ideal para salas educativas de profesionales y técnicos de nivel avanzado. El robot ensamblado ofrece movimientos precisos de rotación de la base, muñeca , codo y gripper conjuntamente con dos servos adicional para proveer movimiento diferencial. Es ofrecido en un package Standard y uno Internet Ready para su control por medio de Internet
Este kit es ideal para salas educativas de profesionales y técnicos de nivel avanzado. El robot ensamblado ofrece movimientos precisos de rotación de la base, muñeca , codo y gripper conjuntamente con dos servos adicional para proveer movimiento diferencial. Es ofrecido en un package Standard y uno Internet Ready para su control por medio de Internet
Ojalá que pronto integremos la Robótica educativa en nuestra escuela, ya que al tener a disposición éstos elementos hace que los alumnos se sientan protagonistas de su propio desarrollo.
Referencias Bibliográficas:
http://www.rmm.cl/index_sub.php?id_contenido=5349&id_seccion=3437&id_portal=520
http://72.14.253.104/search?q=cache:Ms1FLRvN8dQJ:colos.fcu.um.es/TICEC05/TICEC05/54_567.pdf+La+Rob%C3%B3tica+educativa&hl=es&ct=clnk&cd=10&gl=mx
http://www.rmm.cl/index_sub.php?id_seccion=3437&id_portal=520&id_contenido=5237
http://www.formatex.org/micte2006/pdf/962-966.pdf.
http://www.monografias.com/trabajos6/larobo/larobo.shtml
http://scmstore.com/robotic/arm/EduArm/




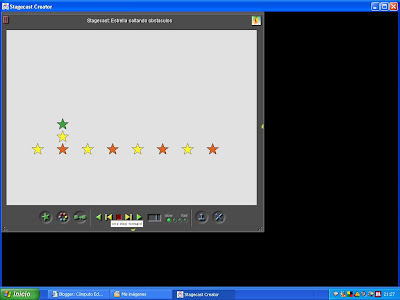
 Para finalizar, le indicamos play y la estrella verde brincará los obstáculos indicados anteriormente, siguiendo siempre su trayectoria horizontal, al momento de copiar las veces necesarias los obstáculos, la estrella verde siempre los brincará y seguirá su trayectoria horizontal.
Para finalizar, le indicamos play y la estrella verde brincará los obstáculos indicados anteriormente, siguiendo siempre su trayectoria horizontal, al momento de copiar las veces necesarias los obstáculos, la estrella verde siempre los brincará y seguirá su trayectoria horizontal.